赤外線送受信のプログラムのインストール
最初に操作したい機器についている純正のリモコンと、前項のRaspberry piを用意する。
Raspberry piでは前提となるpigpioをインストールして以下のように設定する。
$ sudo apt install pigpio
$ pip install pigpio
$ sudo systemctl enable pigpiod.service
$ sudo systemctl start pigpiod
$ crontab -e
#エディタが開いたら以下の文を追記
@reboot until echo 'm 17 w w 17 0 m 18 r pud 18 u' > /dev/pigpio; do sleep 1s; done
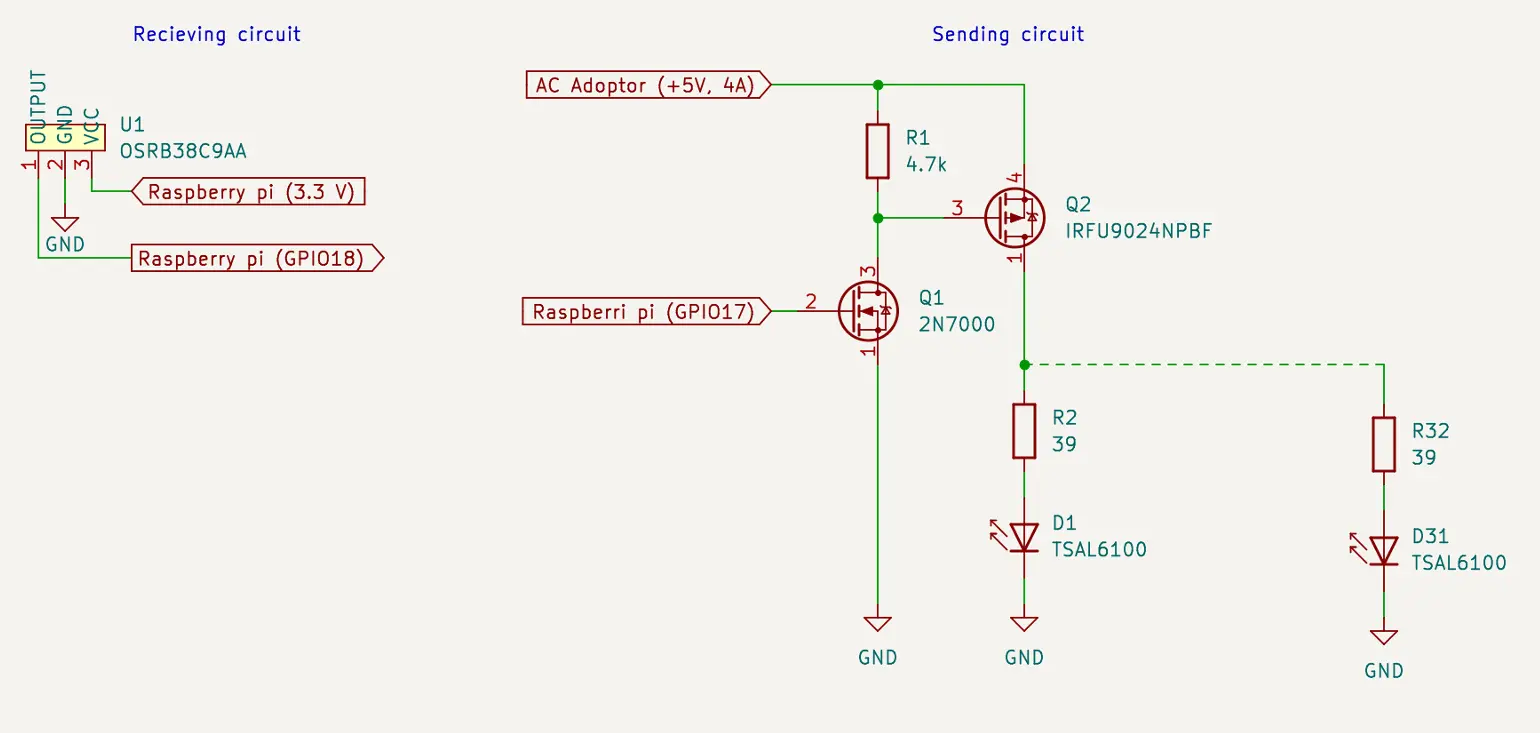
ここで、w 17, r 18はRaspberry piのpinの番号で他のpinを使いたい場合は数字を変える(Raspberry piのpinの振り分けをよく確認すること!)。
w, rはRaspberry piの動作でそれぞれ出力、入力を意味している。pudはプルアップ・プルダウン抵抗のことで、ここでは18pinをプルアップ(u)に設定している。
上記の参考サイトにもあるIR Record and
Playbackをダウンロードして、
適当なディレクトリ上に保存する。
Linux/macなら、
cd <保存したいディレクトリ名>
curl https://abyz.me.uk/rpi/pigpio/code/irrp_py.zip | zcat > irrp.py
これだけでは働かないので、リモコンの赤外線信号を覚えさせる必要がある。
以下のコマンドを実行するとRecordingという文字が現れるので受光部に向かって
リモコンで教えさせたいボタンを押す。
成功するとOkayと出る。
$ python3 irrp.py -r -g18 -f codes <信号名(任意)> --no-confirm --post <信号長(<=130)>
信号長は任意だが、エアコン等は信号自体が長いので130 msとったほうが良さそう。
覚えさせた赤外線の信号は{ON時間(ms),OFF時間(ms), ON, OFF, ...}という配列でJSON形式で同じディレクトリ内のcodesというファイルに記録される。
次に覚えさせた信号が正しいか以下のコマンドで確認する。
$ python3 irrp.py -p -g17 -f codes <覚えさせた信号名>
ここで動作しなかった場合はうまく信号を記録できていないので再度記録、実行を繰り返してみる。
MQTTで実行
MQTT経由で前項のコマンドを実行できるようにする。
まずはコマンドを実行しやすくするために、以下のようなシェルスクリプトを書く。
#!/bin/sh
name=$1
python3 <irrp.pyの相対パス> -p -g17 -f <codesの相対パス> "$name"
相対パスはこのシェルスクリプトのあるディレクトリに対してのそれぞれの位置のことで、同じ階層なら./<ファイル名>とかで問題ない。
これをC/C++で実行するには以下のようにプログラムを書く
system("<シェルスクリプトの絶対パス> <覚えさせた信号名>")
例えば前のシェルスクリプトがremort_ctrl.shという名前で自分のホームディレクトリにあり、覚えさせた信号名がaircon:onだった場合。
system("/home/<ユーザー名>/remort_ctrl.sh aircon:on")
これでCでコマンド実行できる。
次にMQTTのクライアントを実装する(libmosquittoppが必要)。
ここでは詳しく説明をしないが、以下のようなプログラムを書いた。
参考: mosquitopp_client
参考: Mosquitto
C++ sample code to publish
MQTTClient.hpp
#ifndef MQTTCLIENT
#define MQTTCLIENT
#include <mosquittopp.h>
#include <string.h>
#include <iostream>
#include <sstream>
#include "GlobalVariables.hpp"
#define MAX_PAYLOAD 50
#define DEFAULT_KEEP_ALIVE 60
class MQTTClient : public mosqpp::mosquittopp {
public:
~MQTTClient();
void on_connect(int rc);
MQTTClient(const char *_id, const char *_hostname, int _port, char *topic);
void on_message(const struct mosquitto_message *message);
void on_subscribe(int mid, int qos_count, const int *granted_qos);
void on_publish(int mid);
bool sendMessage(char *message, int qos, bool retain);
bool sendMessage(int sendnum, int qos, bool retain);
std::string getMessage();
void clearMessage();
private:
const char *clientid;
const char *hostname;
char *topic;
int port;
int keepalive;
std::string _messages;
};
inline MQTTClient::MQTTClient(const char *_id, const char *_hostname, int _port, char *_topic) : mosquittopp(_id) {
mosqpp::lib_init();
clientid = _id;
hostname = _hostname;
port = _port;
topic = _topic;
keepalive = DEFAULT_KEEP_ALIVE;
connect(hostname, port, keepalive);
}
inline bool MQTTClient::sendMessage(char *message, int qos = 0, bool retain = false) {
int ret = publish(NULL, topic, strlen(message), message, qos, retain);
return (ret == MOSQ_ERR_SUCCESS);
}
inline bool MQTTClient::sendMessage(int sendnum, int qos = 0, bool retain = false) {
std::stringstream ssnum;
ssnum.str("");
ssnum << sendnum;
const char *message=(ssnum.str()).c_str();
int ret=publish(NULL, topic, strlen(message), message, qos, retain);
return (ret==MOSQ_ERR_SUCCESS);
}
inline std::string MQTTClient::getMessage() {
int ret=subscribe(NULL, topic);
return _messages;
}
inline void MQTTClient::clearMessage() { _messages="" ; }
inline MQTTClient::~MQTTClient() { mosqpp::lib_cleanup(); }
#endif // !MQTTCLIENT
MQTTClient.cpp
#include "MQTTClient.hpp"
void MQTTClient::on_connect(int rc) {
if (!rc) {
std::cout << "Connected: " << clientid << "- code " << rc << std::endl;
}
}
void MQTTClient::on_subscribe(int mid, int qos_count, const int *granted_qos){
// std::cout << "Subscription succeeded." << std::endl;
}
void MQTTClient::on_publish(int mid){
std::cout << "Published: " << mid << std::endl;
}
void MQTTClient::on_message(const struct mosquitto_message *message){
int payload_size=MAX_PAYLOAD + 1;
char buf[payload_size];
if (!strcmp(message->topic, topic)) {
memset(buf, 0, payload_size * sizeof(char));
memcpy(buf, message->payload, MAX_PAYLOAD * sizeof(char));
_messages=buf;
} else {
std::cout << "not get message: " << buf << std::endl;
}
}
MQTTHandler.hpp
#ifndef MQTTHANDLER
#define MQTTHANDLER
#include "MQTTClient.hpp"
namespace MQTTHandler {
void publish(MQTTClient *_mqtt, char *message, int qos, bool retain);
void publish(MQTTClient *_mqtt, int sendnum, int qos, bool retain);
std::string getString(MQTTClient *_mqtt);
int getNumbered(MQTTClient *_mqtt);
} // namespace MQTTHandler
inline void MQTTHandler::publish(MQTTClient *_mqtt, char *message, int qos, bool retain) {
int rc = _mqtt->loop();
while (!(_mqtt->sendMessage(message, qos, retain))) {
if (rc) _mqtt->reconnect();
std::cout << "Did't send messages!" << std::endl;
rc=_mqtt->loop();
}
}
inline void MQTTHandler::publish(MQTTClient *_mqtt, int sendnum, int qos, bool retain) {
int rc = _mqtt->loop();
while (!(_mqtt->sendMessage(sendnum, qos, retain))) {
if (rc) _mqtt->reconnect();
std::cout << "Did't send messages!" << std::endl;
rc=_mqtt->loop();
}
}
inline std::string MQTTHandler::getString(MQTTClient *_mqtt) {
std::string output = "";
while (true) {
_mqtt->loop();
output = _mqtt->getMessage();
if (output != "") {
std::cout << "message: " << output << std::endl;
break;
}
// std::cout << "get null: " << output << std::endl;
}
_mqtt->clearMessage();
return output;
}
inline int MQTTHandler::getNumbered(MQTTClient *_mqtt) {
std::string output = "";
while (true) {
_mqtt->loop();
output = _mqtt->getMessage();
if (output != "") {
std::cout << "message: " << output << std::endl;
break;
}
// std::cout << "get null: " << output << std::endl;
}
_mqtt->clearMessage();
return atoi(output.c_str());
}
#endif // !MQTTHANDLER
以上のプログラムでMQTTのクライアントを実装できたので、
このクライアントを起動→メッセージを受け取ったら、前に作ったコマンド実行
をするメイン関数を用意する。
main.cpp
#include <signal.h>
#include <unistd.h>
#include <iostream>
#include <string>
#include "MQTTClient.hpp"
#include "MQTTHandler.hpp"
struct sigaction _sigact;
MQTTClient *client_air;
void signalHandler(int signum) {
using std::cout;
using std::endl;
if (signum == SIGTERM) {
cout << "Stop this prosess (systemctrl) !" << endl;
} else if (signum==SIGINT) {
cout << "kill prosess (ctrl + c) !" << endl;
} delete client_air;
exit(0);
// signalnumber=1;
}
bool signalInit() {
sigset_t _sigset;
int sigsetok=sigemptyset(&_sigset);
if (sigsetok < 0) return false;
sigsetok=sigaddset(&_sigset, SIGINT);
if (sigsetok < 0) return false;
sigsetok=sigaddset(&_sigset, SIGTERM);
if (sigsetok < 0) return false;
memset(&_sigact, 0, sizeof(_sigact));
_sigact.sa_handler=signalHandler;
_sigact.sa_mask=_sigset;
_sigact.sa_flags |=SA_NODEFER;
_sigact.sa_flags |=SA_ONSTACK;
sigsetok=sigaction(SIGINT, &_sigact, NULL);
if (sigsetok < 0) return false;
sigsetok=sigaction(SIGTERM, &_sigact, NULL);
if (sigsetok < 0) return false;
return true;
}
int main(int argc, char *argv[]) {
client_air = new MQTTClient("remortctrl", "<MQTTブローカーのアドレス>", 1883, "remortctrl/airctrl");
std::string mqttrecv;
std::string basecommand = "/home/<ユーザー名>/remort_ctrl.sh aircon:";
int tGlobalLoop = 1e+5; // Unit: [us]
while (true) {
client_air->reconnect();
mqttrecv = MQTTHandler::getString(client_air);
if (mqttrecv.find("on") != std::string::npos) {
system((basecommand + "on").c_str());
} else {
system((basecommand + "off").c_str());
}
usleep(tGlobalLoop);
}
return 0;
}
MQTTブローカーのアドレスは適宜変える(自PCでブローカーが動いている場合は"localhost")。
これで、このページのsystemctlの有効化/無効化の項を参考にバックグラウンドで動かせば、
MQTT経由でメッセージを受け取ると機器を遠隔で操作できるようになる。
因みにこの上の例ではremortctrl/airctrlというトピックでonというメッセージが来たら、aircon:onという信号名が実行される。
offの信号名も登録しておけば、それ以外のメッセージが来たらoffするようになっている。
2022/11/25 追記
この後、実際に運用してみたところCPUの使用率が100%近くになっていることが判明した。
そこでコードの該当部分を以下のように改変した。
MQTTClient.cpp
(中略)
/// on_messageのメソッド内でスクリプトを実行するように書き換えた
void MQTTClient::on_message(const struct mosquitto_message *message) {
int payload_size = MAX_PAYLOAD + 1;
char buf[payload_size];
std::string basecommand = "/home/<ユーザー名>/remort_ctrl.sh aircon:";
std::string mqttrecv = basecommand;
if (!strcmp(message->topic, topic)) {
memset(buf, 0, payload_size * sizeof(char));
/* Copy N-1 bytes to ensure always 0 terminated. */
memcpy(buf, message->payload, MAX_PAYLOAD * sizeof(char));
if (fGlobaldebug) {
std::cout << "getmessage(" << message->topic << "): " << buf << std::endl;
}
mqttrecv +=buf;
system(mqttrecv.c_str());
_messages=buf;
} else {
std::cout << "not get message: " << buf << std::endl;
}
}
main.cpp
(中略)
//#include "MQTTHandler.hpp" //要らなくなったのでコメントアウト
(中略)
/// whileの中をシンプルにしてCPUの使用率を抑える
int main(int argc, char *argv[]) {
if (!signalInit()) return 1; //ctrl+cで正常に止まるように
if (argc == 2 && strstr(argv[1], "debug") != NULL) fGlobaldebug = true; //debug用に付け足した
client_air = new MQTTClient("remortctrl", "<MQTTブローカーのアドレス>", 1883, "remortctrl/airctrl");
std::string mqttrecv;
std::string basecommand = "/home/<ユーザー名>/remort_ctrl.sh aircon:";
int tGlobalLoop = 1e+5; // Unit: [us]
while (true) {
client_air->loop();
client_air->subscribe(NULL, "remortctrl/airctrl");
usleep(tGlobalLoop);
}
return 0;
}
今後は遠隔操作できる様になった機器がついているか、消えているかの監視ができるようにしたい。
電源の電流/電圧を直接見るのはかなり危ないので、カレントトランスとかで電源の電流値を監視するのが手っ取り早いか?